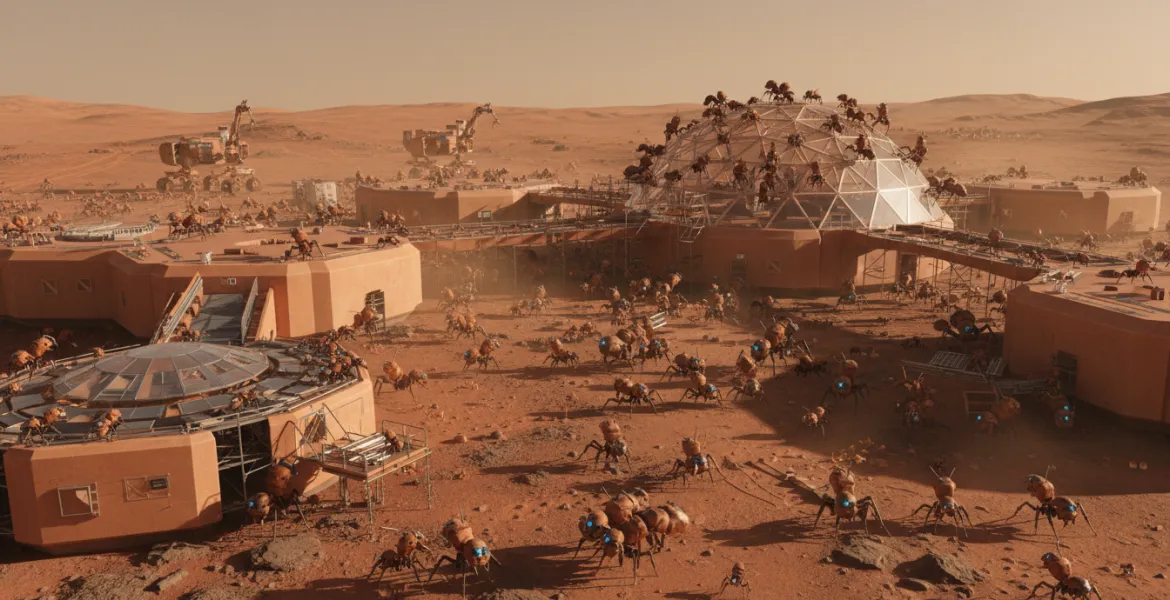
L'ambizioso sogno della colonizzazione spaziale sta per compiere un salto tecnologico senza precedenti, spostando drasticamente l'attenzione dai mastodontici rover solitari a complessi sciami di minuscole macchine coordinate. La ricerca d'avanguardia condotta dalla Harvard University, in stretta collaborazione con il prestigioso Madras Institute of Technology, ha portato alla creazione dei RAnts, una contrazione efficace di "Robotic Ants" (robot-formica). Questi dispositivi miniaturizzati non sono semplici macchine, ma unità autonome capaci di operare attraverso una complessa intelligenza collettiva, un paradigma che promette di riscrivere le regole dell'esplorazione planetaria. Questo approccio rivoluzionario suggerisce che le prime, delicate fasi dell'insediamento su mondi lontani come Marte o la Luna non saranno più affidate esclusivamente a costosi e vulnerabili robot umanoidi o rover di grandi dimensioni, ma a sciami di automi semplici, economici e incredibilmente resilienti.
Il principio cardine di questa innovazione risiede nell'imitazione profonda della biologia terrestre. Proprio come una singola formica non possiede la visione d'insieme necessaria per progettare o costruire un formicaio, ma la colonia nel suo insieme realizza strutture con una perfezione geometrica e funzionale millimetrica, così questi piccoli RAnts possono edificare strutture complesse seguendo esclusivamente regole locali elementari. Il cuore pulsante di questa innovazione risiede nel superamento dei limiti computazionali e logistici che hanno frenato l'esplorazione spaziale per decenni. Nelle missioni interplanetarie, il peso, l'ingombro e il consumo energetico di processori potenti rappresentano ostacoli critici quasi insormontabili. I ricercatori di Harvard, guidati da un team interdisciplinare nel corso del 2024, hanno dimostrato che non è affatto necessario dotare ogni singolo robot di un'intelligenza artificiale centralizzata o avanzata. Al contrario, è sufficiente implementare un set di comportamenti basilari che, quando moltiplicati per centinaia o migliaia di unità, generano un comportamento emergente simile a una mente alveare.
Questo sistema riduce drasticamente il rischio di fallimento della missione: se un singolo RAnt subisce un guasto o viene distrutto dalle condizioni avverse di Marte, il resto dello sciame prosegue il lavoro senza subire interruzioni, garantendo una resilienza operativa che i sistemi centralizzati non potranno mai offrire. La capacità di adattamento dello sciame è garantita dall'interazione costante tra i robot e l'ambiente circostante, un processo che gli scienziati definiscono con il termine tecnico di cognizione collettiva o stigmergia. Per coordinarsi senza l'uso di segnali radio complessi o del sistema GPS, che risulta totalmente assente su altri pianeti, i robot utilizzano i cosiddetti fotormoni. Si tratta di ingegnosi segnali luminosi che imitano i feromoni chimici utilizzati dagli insetti sociali sulla Terra. Quando un robot identifica un'area dove è necessario intervenire, emette una scia di luce che attira magneticamente altri membri dello sciame verso l'obiettivo.
Questo meccanismo di feedback positivo permette ai RAnts di concentrare le proprie forze dove c'è più bisogno in tempo reale, creando una dinamica di auto-organizzazione fluida e priva di intoppi gerarchici. I parametri che regolano questo comportamento sono essenzialmente due: la forza dell'interazione sociale e la velocità di manipolazione dei blocchi costruttivi. Questi pochi fattori sono sufficienti per permettere allo sciame di erigere rudimentali ma efficaci strutture abitative o scavare rifugi protettivi contro le radiazioni solari letali utilizzando la regolite di Marte. Oltre alle ovvie applicazioni extraterrestri, questa tecnologia sviluppata tra gli Stati Uniti e l'India trova sbocchi immediati e cruciali in scenari di emergenza sulla Terra. I robot-formica potrebbero essere dispiegati con successo in zone colpite da terremoti devastanti o disastri nucleari, dove la presenza umana è impossibile per motivi di sicurezza, per stabilizzare edifici pericolanti o rimuovere detriti in modo coordinato e sicuro.
La ricerca sottolinea con forza come la semplicità sia la vera chiave per la gestione della complessità moderna. Delegando le decisioni all'ambiente e all'interazione tra pari, si elimina la necessità di una centrale di controllo vulnerabile a interferenze o guasti tecnici. Il futuro delle infrastrutture in ambienti ostili sembra dunque risiedere nel piccolo, nel numeroso e nel collettivo, trasformando radicalmente il modo in cui concepiamo l'ingegneria robotica contemporanea. In conclusione, il successo dei RAnts segna il passaggio definitivo da una robotica deterministica, rigida e fragile, a una robotica stocastica e adattiva. Mentre le principali agenzie spaziali come la NASA e l'ESA pianificano con cura i prossimi passi per il ritorno dell'uomo sulla Luna attraverso il programma Artemis, l'integrazione di sciami robotici appare come l'unica via sostenibile per preparare il terreno e garantire la sopravvivenza dei primi astronauti. La collaborazione tra la Harvard University e il Madras Institute of Technology dimostra che la sinergia tra l'osservazione della natura e l'ingegneria elettronica d'eccellenza può superare le frontiere più estreme dell'universo, rendendo la colonizzazione automatizzata una realtà tangibile e imminente.